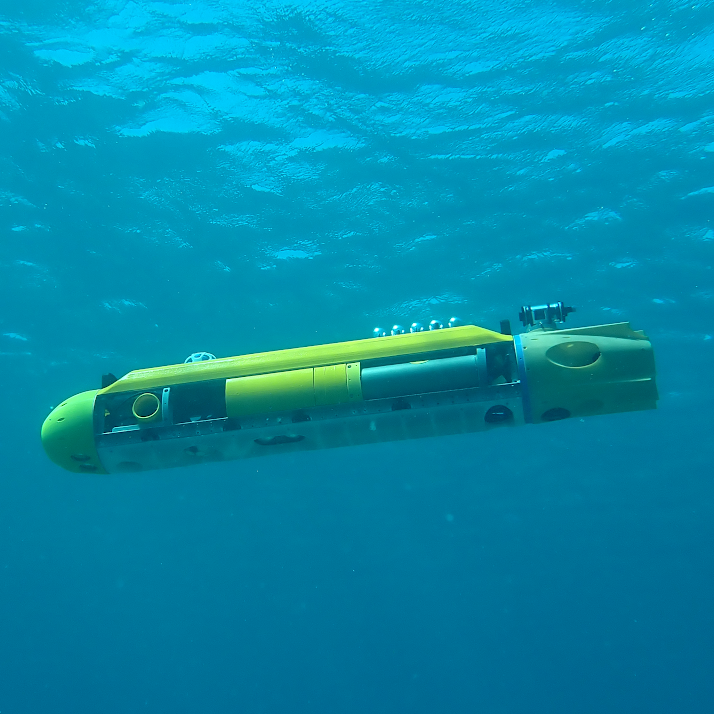
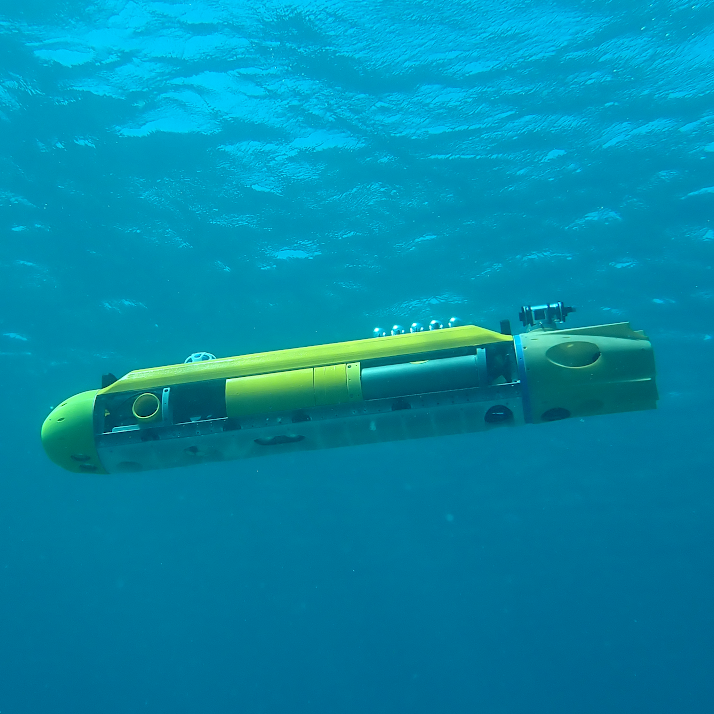
The Seeker AUV is a two-person portable, modular, hover capable and highly manoeuvrable AUV developed at the Australian Centre for Robotics. Designed for capturing low altitude, high-resolution, geo-referenced seafloor imagery over complex underwater terrain, it can also be readily reconfigured for novel optical, acoustic and water column sensing missions. It is designed to be highly manoeuvrable with the ability to hold position, dive vertically and move in constrained spaces around man-made structures, behind the breaking waves of a beach or over rough reef environments whilst staying close to the seafloor.
Other key design features include an open software and hardware architecture allowing for the integration of additional payloads without significant cost in materials or development effort. The nose and forward regions provide space for additional sensors, including optical or hyperspectral cameras, SONAR systems or water column sensors. The vehicle frame can also be easily extended to allow for additional payload space or battery capacity, further increasing endurance.
Key Specifications:
Length:
1.71m
Diameter:
0.25m
Mass:
45kg
Imaging Spd.:
0.5-0.7ms-1
Max Depth:
300m
Endurance:
8h
Max Distance:
16km/10nm
Imaging Alt.:
2m
Base Payload
Navigation:
Nortek Nucleus 1000
Acc. Modem/USBL:
AdNav Subsonus / Evologics
Obstacle Avoidance:
Impact Subsea ISA500
Cameras:
2xDwn 8MP, 1Fwd 2MP
Lighting:
Fwd and rear strobes
Compute:
NVIDIA Xavier NX
Data:
Freewave, Zumlink 900,LoRa, Wifi, Iridium, GigE
Imaging Systems
Underwater stereo imaging systems
We have develop a compact underwater stereo imaging system designed for capturing precise, three-dimensional images of underwater environments. It consists of a pair of synchronized cameras behind glass domes that allow detailed 3D scene images to be collected.
Key Features:
Stereo Camera Pair: Two high-resolution, low-light cameras capture synchronized images, allowing for 3D reconstruction of seafloor structures, marine habitats, or underwater assets.
Waterproof Housing: Pressure-resistant, corrosion-proof housing ensures reliable operation at various depths, rated for 300+ meters (deeper depths available for customised designs).
Integrated Lighting: LED or laser-based illumination enhances image quality in low-light conditions, reducing shadows and backscatter.
Compact & Low-Power Design: Small, lightweight construction allows easy integration with AUVs, ROVs, or diver-operated systems.
Onboard Processing & Data Storage: Real-time image processing and efficient data storage enable quick analysis and post-mission review.
Applications:
Seafloor Mapping & Habitat Monitoring: 3D reconstruction of coral reefs, benthic ecosystems, and underwater structures.
Asset Inspection: Detailed imaging of pipelines, cables, and submerged infrastructure.
Archaeology & Search Operations: Precise documentation of underwater wrecks and artifacts.
Key Specifications:
Resolution:
2x8Mpx
Framerate:
XXHz
Mass:
XXkg
Max Depth:
300m
Bespoke Vehicle Design
Leveraging our modular AUV design to respond to client needs
The Seeker AUV’s open software and hardware architecture allow for the integration of additional payloads without significant cost in materials or development effort. The nose and forward regions provide space for additional sensors, including optical or hyperspectral cameras, SONAR systems or water column sensors. The vehicle frame can also be easily extended to allow for additional payload space or battery capacity, further increasing endurance.
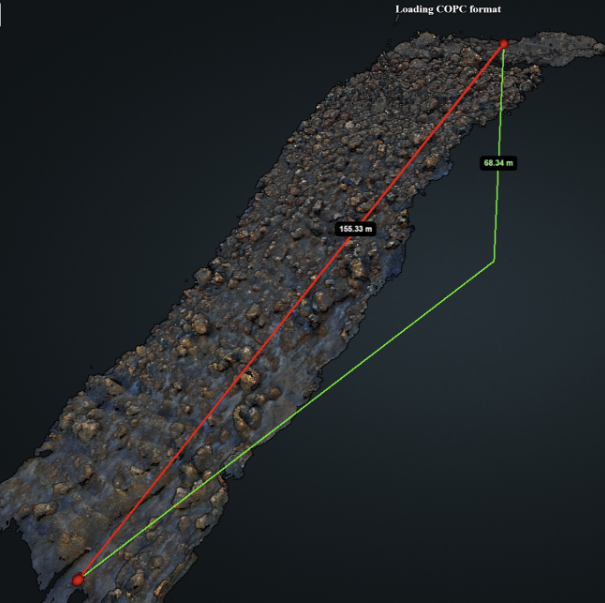
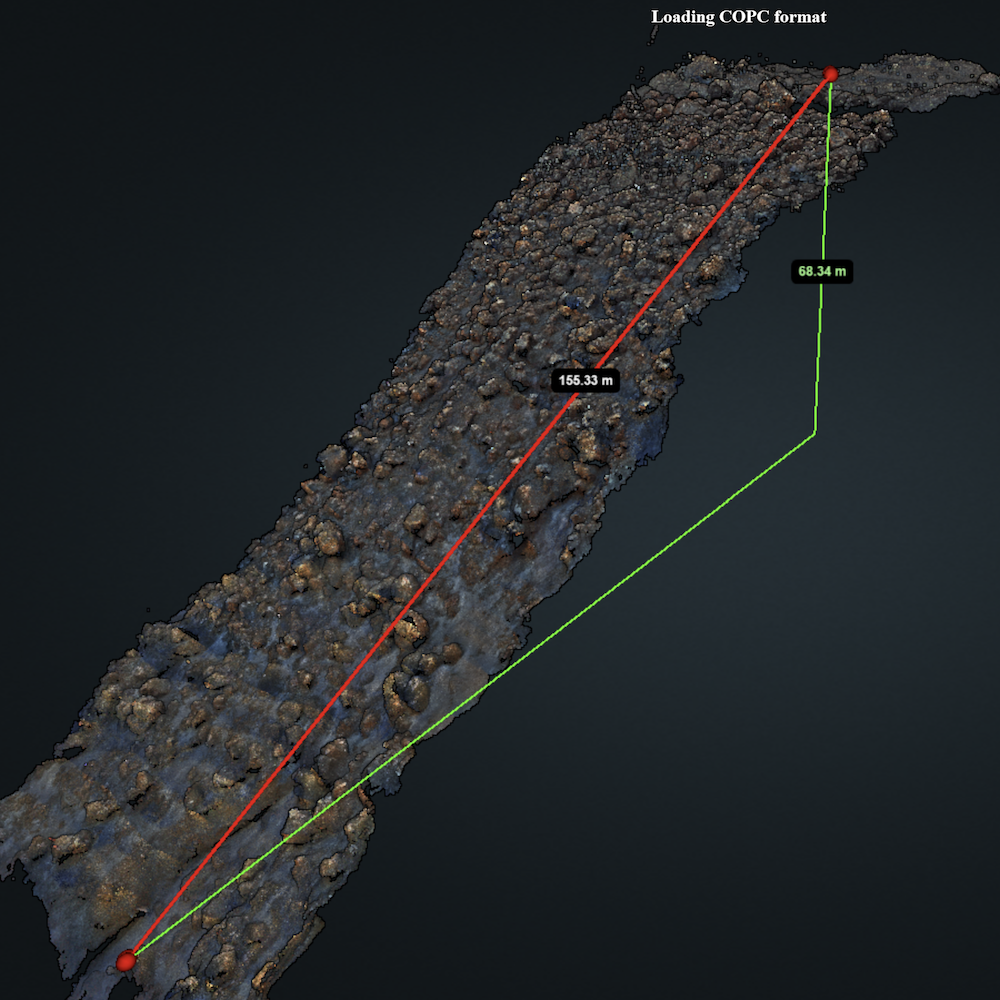
We have developed workflows that allow us to generate detailed, 3D models of the seafloor using the imagery collected by our vehicle systems.
A detailed 3D model of 7800m2 area of seafloor collected in Tonga
Seafloor Image Data
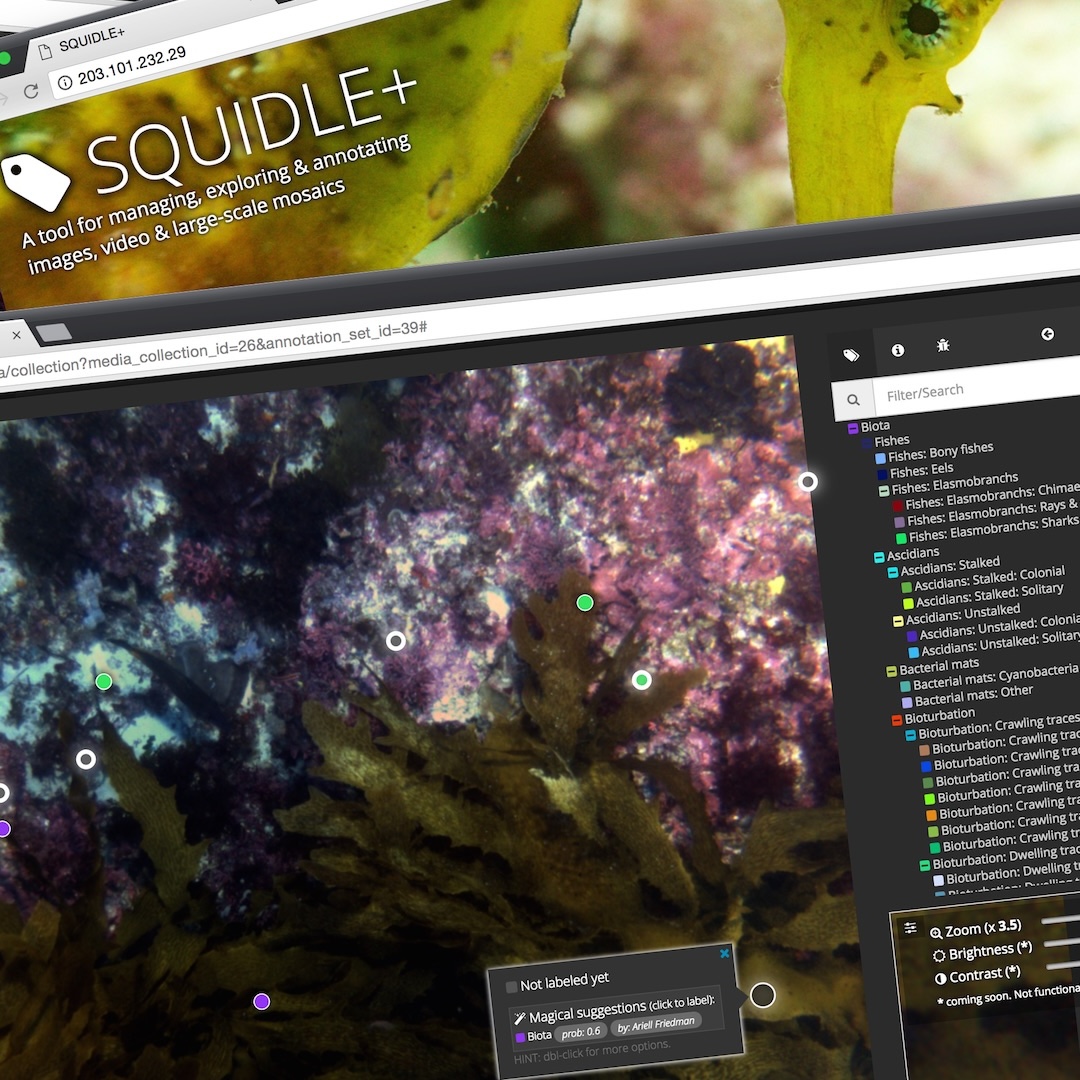
Integration into the Squidle+ system
SQUIDLE+ is a software platform for the management, discovery and annotation of marine imagery. It includes map-based exploration interfaces, advanced annotation workflows, summary reporting tools and analytics through a user-friendly frontend and a comprehensive backend. Sharing, collaboration and release of datasets are managed through user groups with granular permissions, and annotations can be acquired from human users and/or automated Machine Learning (ML) algorithms. SQUIDLE+ expedites data delivery and eliminates the need to transfer, copy and/or reprocess data for import. It provides a centralised repository for annotations while maintaining links to the originating imagery hosted on various pre-existing cloud repositories. The platform offers different annotation modes (whole-frame, points, polygons) and is media-type agnostic (images, videos, large-scale mosaics). Integrated QA/QC tools enable cross-validation between human annotators and between humans and machine learning algorithms.
For more information about this trip visit our Tonga Blog.
Gippsland Victoria
Surveys near future offshore wind installations in Gippsland Victoria 2025/02
In February 2025, the team spent a week in Gippsland Victoria working closely with colleagues from Fathom Pacific conducting multi-AUV surveys in proximity to new offshore wind leases.
Norfolk Island
Surveys around Norfolk and Phillip Islands 2025/05
In May 2025, the team spent a week at Norfolk Island working closely with colleagues from the Australian Museum and the New Zealand Museum conducting AUV surveys around Norfolk and Phillip Islands.
This second phase of the Norfolk Island scientific expedition is led by the Australian Museum Research Institute (AMRI) working in collaboration with the University of Sydney, Parks Australia and the Museum of New Zealand Te Papa Tongarewa, and the Auckland War Memorial Museum, alongside the local Norfolk Island community. The current expedition to Norfolk Island builds on the terrestrial survey undertaken by AMRI Scientists in 2022-2023.
On this expedition, scientists undertook shore and vessel-based activities to collect fish and marine invertebrates, such as corals, crabs and molluscs, as well as algae, to expand knowledge of the marine environment. The focus of the AUV surveys was on selected reefs around Norfolk and Phillip Islands.
An overview of the sites visited by the AUV shown in green around Norfolk and Phillip Islands. Each AUV dive covered 1-3km of transect, collecting detailed, high-resolution imagery of the seafloor. The bathymetric map of the seafloor around the islands was collected using LIDAR and acoustic data and was supplied by the Australian Hydrographic Office. AUV dives targeted particular seafloor features representing reefs around the islands at depths from 5-45m of water depth.
Fieldwork
We have supported numerous field campaigns, collecting data in support of environmental survey, inrastructure inspection and security related trials
Tonga
Surveys of mesophotic reefs in Tonga supported by the Inkfish Foundation 2024/10
Gippsland Victoria
Surveys near future offshore wind installations in Gippsland Victoria 2025/02
Norfolk Island
Surveys around Norfolk and Phillip Islands 2025/05
Seeker AUV
A highly maneouverable AUV for Seafloor Survey
The Seeker AUV is a two-person portable, modular, hover capable and highly manoeuvrable AUV developed at the Australian Centre for Robotics. Designed for capturing low altitude, high-resolution, geo-referenced seafloor imagery over complex underwater terrain, it can also be readily reconfigured for novel optical, acoustic and water column sensing missions. It is designed to be highly manoeuvrable with the ability to hold position, dive vertically and move in constrained spaces around man-made structures, behind the breaking waves of a beach or over rough reef environments whilst staying close to the seafloor.
Other key design features include an open software and hardware architecture allowing for the integration of additional payloads without significant cost in materials or development effort. The nose and forward regions provide space for additional sensors, including optical or hyperspectral cameras, SONAR systems or water column sensors. The vehicle frame can also be easily extended to allow for additional payload space or battery capacity, further increasing endurance.
Key Specifications:
Length:
1.71m
Diameter:
0.25m
Mass:
45kg
Imaging Spd.:
0.5-0.7ms-1
Max Depth:
300m
Endurance:
8h
Max Distance:
16km/10nm
Imaging Alt.:
2m
Base Payload
Navigation:
Nortek Nucleus 1000
Acc. Modem/USBL:
AdNav Subsonus / Evologics
Obstacle Avoidance:
Impact Subsea ISA500
Cameras:
2xDwn 8MP, 1Fwd 2MP
Lighting:
Fwd and rear strobes
Compute:
NVIDIA Xavier NX
Data:
Freewave, Zumlink 900,LoRa, Wifi, Iridium, GigE
Imaging Systems
Underwater stereo imaging systems
We have develop a compact underwater stereo imaging system designed for capturing precise, three-dimensional images of underwater environments. It consists of a pair of synchronized cameras behind glass domes that allow detailed 3D scene images to be collected.
Key Features:
Stereo Camera Pair: Two high-resolution, low-light cameras capture synchronized images, allowing for 3D reconstruction of seafloor structures, marine habitats, or underwater assets.
Waterproof Housing: Pressure-resistant, corrosion-proof housing ensures reliable operation at various depths, rated for 300+ meters (deeper depths available for customised designs).
Integrated Lighting: LED or laser-based illumination enhances image quality in low-light conditions, reducing shadows and backscatter.
Compact & Low-Power Design: Small, lightweight construction allows easy integration with AUVs, ROVs, or diver-operated systems.
Onboard Processing & Data Storage: Real-time image processing and efficient data storage enable quick analysis and post-mission review.
Applications:
Seafloor Mapping & Habitat Monitoring: 3D reconstruction of coral reefs, benthic ecosystems, and underwater structures.
Asset Inspection: Detailed imaging of pipelines, cables, and submerged infrastructure.
Archaeology & Search Operations: Precise documentation of underwater wrecks and artifacts.
Key Specifications:
Resolution:
2x8Mpx
Framerate:
XXHz
Mass:
XXkg
Max Depth:
300m
Bespoke Vehicle Design
Leveraging our modular AUV design to respond to client needs
The Seeker AUV’s open software and hardware architecture allow for the integration of additional payloads without significant cost in materials or development effort. The nose and forward regions provide space for additional sensors, including optical or hyperspectral cameras, SONAR systems or water column sensors. The vehicle frame can also be easily extended to allow for additional payload space or battery capacity, further increasing endurance.
We have developed workflows that allow us to generate detailed, 3D models of the seafloor using the imagery collected by our vehicle systems.
A detailed 3D model of 7800m2 area of seafloor collected in Tonga
Seafloor Image Data
Integration into the Squidle+ system
SQUIDLE+ is a software platform for the management, discovery and annotation of marine imagery. It includes map-based exploration interfaces, advanced annotation workflows, summary reporting tools and analytics through a user-friendly frontend and a comprehensive backend. Sharing, collaboration and release of datasets are managed through user groups with granular permissions, and annotations can be acquired from human users and/or automated Machine Learning (ML) algorithms. SQUIDLE+ expedites data delivery and eliminates the need to transfer, copy and/or reprocess data for import. It provides a centralised repository for annotations while maintaining links to the originating imagery hosted on various pre-existing cloud repositories. The platform offers different annotation modes (whole-frame, points, polygons) and is media-type agnostic (images, videos, large-scale mosaics). Integrated QA/QC tools enable cross-validation between human annotators and between humans and machine learning algorithms.
For more information about this trip visit our Tonga Blog.
Gippsland Victoria
Surveys near future offshore wind installations in Gippsland Victoria 2025/02
In February 2025, the team spent a week in Gippsland Victoria working closely with colleagues from Fathom Pacific conducting multi-AUV surveys in proximity to new offshore wind leases.
Norfolk Island
Surveys around Norfolk and Phillip Islands 2025/05
In May 2025, the team spent a week at Norfolk Island working closely with colleagues from the Australian Museum and the New Zealand Museum conducting AUV surveys around Norfolk and Phillip Islands.
This second phase of the Norfolk Island scientific expedition is led by the Australian Museum Research Institute (AMRI) working in collaboration with the University of Sydney, Parks Australia and the Museum of New Zealand Te Papa Tongarewa, and the Auckland War Memorial Museum, alongside the local Norfolk Island community. The current expedition to Norfolk Island builds on the terrestrial survey undertaken by AMRI Scientists in 2022-2023.
On this expedition, scientists undertook shore and vessel-based activities to collect fish and marine invertebrates, such as corals, crabs and molluscs, as well as algae, to expand knowledge of the marine environment. The focus of the AUV surveys was on selected reefs around Norfolk and Phillip Islands.
An overview of the sites visited by the AUV shown in green around Norfolk and Phillip Islands. Each AUV dive covered 1-3km of transect, collecting detailed, high-resolution imagery of the seafloor. The bathymetric map of the seafloor around the islands was collected using LIDAR and acoustic data and was supplied by the Australian Hydrographic Office. AUV dives targeted particular seafloor features representing reefs around the islands at depths from 5-45m of water depth.
About Us
our story
Seascape Autonomy is a spinoff of the University of Sydney. Our aim is to provide high-quality seafloor imaging through concurrent deployment of novel benthic-imaging AUVs.
Our Team
Our team have over 75 years of collective experience in deploying marine robotic systems